
“Z”-épület előtti terület: 53. számú stand
Lexus RX 450h típusú önvezető jármű

A konferenciára látogatók betekintést nyerhetnek egy fejlett autonóm járműves kutatási és validációs platform működésébe, amelynek alapját egy átalakított Lexus kísérleti tesztjármű képezi. A jármű komplex érzékelő-, valamint precíziós RTK GNSS helymeghatározó rendszerrel rendelkezik. A platform emellett 5G kommunikációs kapcsolattal és fedélzeti V2X egységgel is fel van szerelve.
A jármű számítási architektúrájának központja egy ROS2-alapú szoftverkörnyezetet futtató, nagy teljesítményű ipari számítógép, amelyet egy valós idejű célhardver egészít ki a szabályozási és járműdinamikai modellek futtatásához. Ez az architektúra lehetővé teszi fejlett automatizált vezetési funkciók gyors prototípus-fejlesztését és integrációját, beleértve az érzékelést, szenzorfúziót, pályatervezést és járműirányítást.
A fizikai járműplatform mellett egy teljes X-in-the-Loop tesztelési ökoszisztéma is kiépítésre került, amely támogatja a biztonságos, skálázható és költséghatékony fejlesztési és validációs folyamatokat. A Software-in-the-Loop (SiL) környezet integrálja a ROS2 alapú járműszoftver-rendszert egy ipari szimulációs platformmal, lehetővé téve az új algoritmusok laboratóriumi környezetben történő vizsgálatát úgy, hogy közben a teljes szoftverarchitektúra változatlan marad. Ez reprodukálható és kontrollált tesztelést biztosít komplex közlekedési szituációk esetén még a valós járműves implementáció előtt.
A platform része továbbá egy beágyazott Vehicle-in-the-Loop (ViL) rendszer is. Ennek segítségével virtuális közlekedési szereplők és dinamikusan generált forgalmi szcenáriók illeszthetők be a jármű szoftverrendszerébe az eredeti szenzorinterfészeken keresztül. Ez a megközelítés jelentősen növeli a tesztelés biztonságát, miközben lehetővé teszi ritka vagy veszélyes forgalmi helyzetek hatékony vizsgálatát.
HUN-REN SZTAKI Mobil Robotikai Kutatócsapat
Unitree G1 humanoid és Go2 négylábú robotok
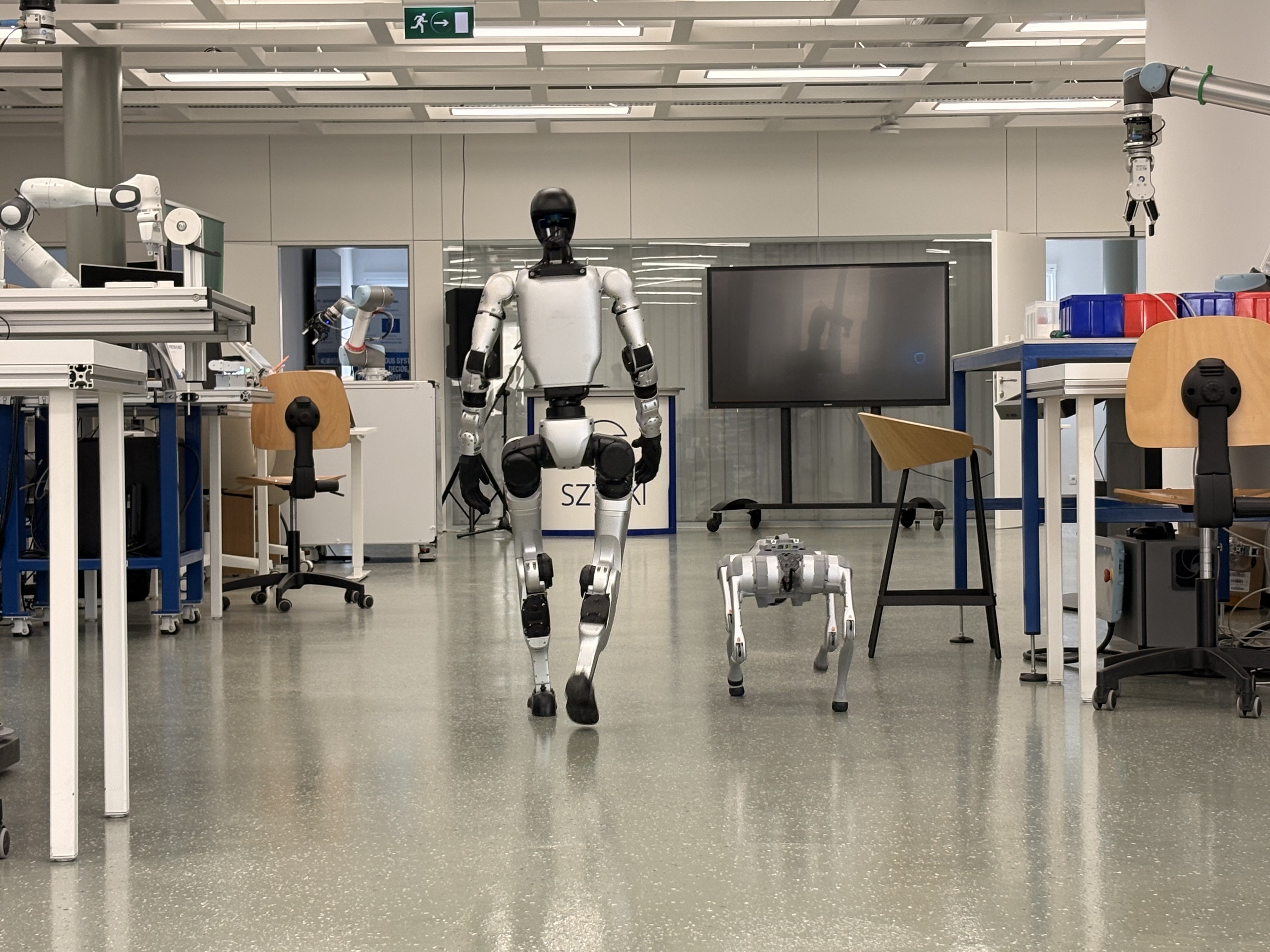
A HUN-REN SZTAKI Mobil Robotikai Kutatócsapata Unitree G1 humanoid és Go2 négylábú robotok fejlesztésén dolgozik, a rendszerszintű tervezés teljes palettáját lefedve: a természetes nyelvi interakciótól az érzékelésen és mozgástervezésen át a precíz végrehajtásig.
A kommunikációs és szemantikai döntéshozatali réteget nagy nyelvi modellek alkotják, amelyek nemcsak értelmezik a felhasználói utasításokat, hanem közvetlenül végrehajtható robotikai parancsokká is alakítják azokat – így egy egyszerű kérés is konkrét fizikai cselekvést válthat ki. A megbízható mozgásvégrehajtás előfeltétele a környezet pontos érzékelése, ezért a látórendszerek terén a kutatások célja olyan megoldások kifejlesztése, amelyekben korszerű mélytanulási módszerek dolgoznak fel szenzoradatokat – köztük az RGB-D képeket és a LiDAR-alapú pontfelhőket, és biztosítják a környezet geometriai és szemantikai megértését; lehetővé téve az autonóm működést és a finommanipulációt.
A komplex mozgások generálásához a kutatók imitációs és megerősítéses tanulást alkalmaznak: előbbi emberi demonstrációkból nyeri ki a mozgásmintákat, utóbbi szimulációs környezetben finomítja őket. Az alacsony szintű, matematikailag megalapozott végrehajtás érdekében a csapat Model Predictive Control alapú eljárásokat is alkalmaz.
A kutatócsoport hosszú távú víziója egy olyan keretrendszer kialakítása, amelyben a nagy nyelvi modell nem pusztán chatbotként működik, hanem cselekvőképes rendszer részeként: a Model Context Protocol (MCP) szabványra építve strukturáltan kapcsolódik a robot eszközeihez és érzékelőihez, és a rendszer önállóan tervez, eszközöket hív meg, és komplex feladatsorozatokat hajt végre.
Ezzel drasztikusan csökken a technológiai szakadék a nem műszaki háttérrel érkező felhasználók és a csúcstechnológia között, ezáltal az átlagfelhasználó is természetes módon irányíthat összetett robotikai rendszereket – anélkül, hogy szembesülnie kellene azok belső komplexitásával.

Tartalom megosztása: